团队简介
72886必赢欢迎光临特种智能装备关键技术研究团队重点针对管道、油罐、空中、野外以及易燃易爆等特种作业环境下自动化装备与特种机器人设计及应用等方面存在的相关问题,开展的机器人的构型与自动化装备结构设计;在研究其运动学、动力学特性的基础上,开展智能控制的理论和方法研究,同时对机器视觉与人工智能基础理论和技术进行深入研究,并与自动化装备和机器人技术进行深度融合,在特种智能装备结构设计、运动学、动力学、多目标视觉跟踪技术、三维点云与二维图像融合技术等方面形成了一定的优势与特色。
团队固定人员共有3人,其中教授1人,副教授、讲师等科研人员各1人。现有在读研究生17名。先后获得了国家自然科学基金面上项目和应急项目、科技支撑计划计划、省自然科学基金面上项目、省科技厅国际科技合作项目等的资助,同时,和科研院所及国有大中型合作项目超过30余项,具有从事特种智能装备关键技术的基础研究条件。
近五年研究团队已发表论文30余篇,包括Journal of Magnetics 、Review of Scientific Instruments、Complexity、International Journal of Advanced Robotic Systems 、Advanced Engineering Science、Chinese Journal of Mechanical Engineering、Journal of Zhejiang University (Engineering Science)、International Journal of Distributed Sensor Networks、强激光与粒子束、仪器仪表学报、工程设计学报、机械科学与技术、机械设计与制造等国内外权威或核心期刊。研究成果获得湖北省科技进步二等奖3项(第一单位)、湖北省科技进步三等奖1项(第一单位)、武汉市科技进步二等奖1项(第一单位)。授权发明专利20余项。
成员介绍
负责人:
张铮,男,工学博士,教授,主要从事特种智能装备设计、智能控制与检测、机电一体化技术、无线传感器网络、机器人技术、设备的智能故障诊断与监测方面教学和科研工作。主持完成国家自然基金1项、省科技厅国际科技合作项目和教育厅重点项目各1项,主持完成横向科研项目10余项,主持项目到账经费合计300万元,获湖北省科技进步二等奖3项。发表学术论文70余篇,被SCI、EI收录30余篇。授权发明专利10余项、软件著作权9项。
成员:

张铮 教授/博士 1970年3月 |

徐显金 副教授/博士 1971年10月 |

汪威 讲师/博士 1975年10月 |
主要科研成果及项目
| 序号 |
项目名称 |
项目来源 |
负责人 |
到帐金额 |
起止年月 |
| 1 |
聚氨酯材料成型装备关键技术及应用 |
湖北省科技进步二等奖 |
张铮 |
|
2015.8 |
| 2 |
快速高精3D打印关键技术研究及产业化 |
湖北省科技进步二等奖 |
张铮 |
|
2020.12 |
| 3 |
面向汽车电子组件的视觉引导智能装配关键技术与应用 |
湖北省科技进步二等奖 |
汪威 |
|
2018.12 |
| 4 |
复杂异型纸盒智能成型关键技术及应用 |
湖北省科技进步三等奖 |
徐显金 |
|
2018.12 |
| 5 |
高压直流输电线路磁悬浮巡检机器人的关键技术研究 |
国家自然科学基金 |
徐显金 |
80万 |
2014.01-2017.12 |
| 6 |
基于UWB和开窗时间反演的室内WSN高精度节点定位方法研究 |
国家自然科学基金 |
张铮 |
19.6万 |
2016.1-2016.12 |
| 7 |
架空高压直流输电线路磁悬浮巡检机器人 |
湖北省科技支撑计划 |
徐显金 |
50万 |
2015.01-2017.12 |
| 8 |
农业CNC自动化系统研发 |
湖北省科技支撑计划 |
徐显金 |
50万 |
2015.01-2017.12 |
| 9 |
室内WSN节点协同定位理论与目标跟踪方法 |
湖北省科技厅国际科技合作项目 |
张铮 |
10万 |
2013.1-2014.1 |
| 10 |
多目视觉引导机器人绝对定位技术的研究 |
省自然科学基金面上项目 |
汪威 |
3万 |
2016.9-2018.12 |
| 11 |
高燃速药柱自动整形装备研究 |
内蒙古合成化工研究所 |
张铮 |
75万 |
2019.12-2020.12 |
| 12 |
机器人本体设计与加工 |
海军工程大学 |
张铮 |
88.2万 |
2020.9-2021.12 |
| 13 |
基于弱刚性大时延主从控制算法配电网带电作业机器人研制 |
国网湖南电力有限公司检修公司 |
徐显金 |
16.5万 |
2019.01-2020.12 |
| 14 |
视觉定位激光打标系统 |
武汉欧双光电科技有限公司 |
汪威 |
21万 |
2017.12-2019.11 |
| 15 |
3D AOI技术研发与应用 |
深圳市为德讯科技有限公司 |
汪威 |
30万 |
2021.9- |
| 16 |
头枕发泡机控制系统技术开发 |
兴桥高分子材料科技有限公司 |
张铮 |
19.6万 |
2013.2-2014.4 |
| 17 |
湖北宏锦汽车内饰件股份有限公司72886必赢欢迎光临产学研协议 |
湖北宏锦汽车内饰件股份有限公司 |
张铮 |
10万 |
2017.7-2018.10 |
| 18 |
安瓿水针剂自动灯检机研究开发 |
湖北武当动物药业有限公司 |
汪威 |
23万 |
2013.4-2014.10 |
| 19 |
智能公共自行车的车载控制器研发 |
北京途自在物联科技有限公司 |
张铮 |
12万 |
2016.8-2017.8 |
| 20 |
5G天线总检设备开发 |
武汉虹信科技发展有限责任公司 |
汪威 |
58万 |
2020.9-2021.9 |
团队照片展示
科研成果
1.基于UWB和开窗时间反演的室内WSN高精度节点定位方法研究
本项目的主要针对室内无线传感器节点定位精度不足难以满足工程需求的问题,采用时间反演理论和TOA节点测距原理,在研究超宽带(UWB)通信技术较强的多径分辨能力和时间反演理论的时空聚焦特性的基础上,分析了窗口的位置及窗口宽度对聚焦波形和聚焦时间的影响规律,确定了时间窗口参数调整对多径信号分离的方法,研究了基于接收信号能量和波形特征的 LOS/NLOS 信标节点感知方法和基于UWB时间反演的障碍物材质识别及测距误差校正方法,完成了高精度室内节点定位原型系统设计研究结果表明开窗时间反演的超宽带TOA 测距方法,提高了室内WSN测距精度。
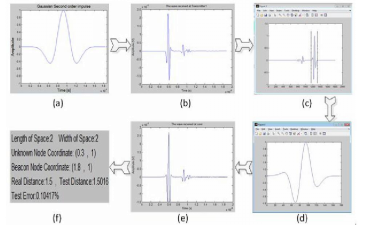
基于时间反演的节点测距过程
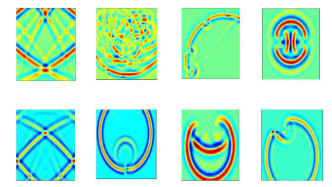
电磁波在室内环境下的传播仿真
室内 UWB 精确定位系统平台
不同障碍物的材质影响分析
2.高燃速药柱自动整形装备
针对某型高燃速药柱整形过程中存在的危险系数高、加工精度不高、药柱粘弹性高以及生产加工效率低等问题,设计了一套药柱自动整形设备。该整形设备通过六工位旋转加工台并运用多轴气动机械臂对药柱进行上料与卸料,实现对药柱加工的高效性;在机械臂关节处采用液压缓冲器,减少气缸之间的硬冲击,实现了对药柱高精度的抓取,并在药柱加工工位采用凹形对接接口,利用上下压板定位,保证药柱在加工位上位置精度;为防止药柱粘弹问题,在设备上采用特制吸盘、顶锥设计、喷涂防粘镀层,保证药柱能顺利加工,防止粘死。在整形设备上利用多传感器实时检测与信号处理技术,实现了多工位信息采集与智能控制的协同作业;搭建人机交互界面实现智能交互;设计监控系统实时反馈状态参数信息,保证各工位实时监控。
目前高燃速药柱自动整形设备以投入生产加工,生产效率为人工4倍且产品加工质量高于人工,目前产生累计产值接近2亿。



高燃速药柱自动整形装备

六工位旋转加工转盘
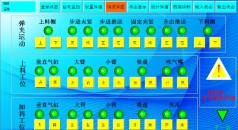

手动操作与调试界面
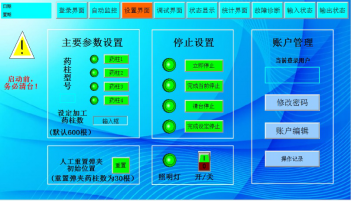
自动设置界面
3.机器人本体设计与加工
本项目针对海船管道内海洋生物难以清洗的问题,设计了一种三段旋进式管道清洗机器人本体,采用气动马达和多个气缸协同作业方式,能够实现机器人本体沿DN200管道内壁前进、后退及在任意位置启停的功能;采用模块化设计思想对机器人本体进行欠驱动结构与控制系统设计,使其能沿DN200的管道内壁爬升、弯管转弯。并以该机器人本体为研究对象,分析其在不同应用环境的受力情况,并从理论上对其结构约束参数及关键部位运动学进行分析研究,优化机器人本体结构;利用仿真软件进行仿真验证与数据分析,进一步优化机器人本体结构参数,提高其竖直爬升、转弯得动力性能;并试制试验样机进行实验验证,对管道机器人性能进行进一步优化。最终的管道清洗机器人性能良好,能稳定的在各种状态管道内平稳运行。
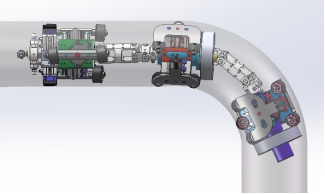
管道机器人模型
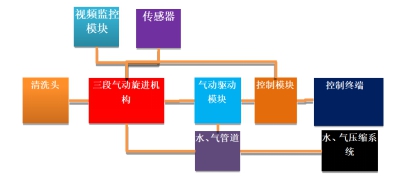
机器人系统结构

机器人实验平台
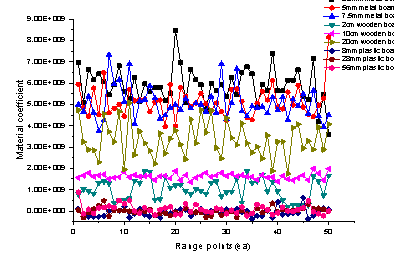
4.架空高压直流输电线路磁悬浮巡检机器人的关键技术研究
为解决架空高压输电线巡检机器人行走打滑以及巡检效率问题,本项目首次采用了一种基于磁悬浮的巡检机器人的技术方案:利用高压直流导线周围的磁场,实现巡检机器人的零接触、无打滑、高效地移动方式。首先从原理上对基于高压直流磁场的磁悬浮方式进行模型设计,并运用理论和仿真工具对原理的正确性进行了研究和验证,在此基础上,设计了磁悬浮原理性最小系统并进行了相关实验,实验结果表明基于高压直流磁场的磁悬浮方式在原理上是正确的,在技术上是可行的;为实现磁悬浮运行方式的巡检机器人能合理高效地跨越障碍,设计了2种不同的越障机械结构:一种机构由平面连杆机构和丝杠螺母机构组成,具有两个自由度,通过对两个原动件控制,使机器人具有开合壳体,翻转避障的功能。另一种越障机构利用丝杆螺母实现机器人主体的张合运动,从而实现越障;最后对磁悬浮巡检机器人进行了控制系统设计,完成了系统集成,为实现具有真正实用功能的磁悬浮巡检机器人打下了基础。通过本项目的研究,不仅丰富了磁悬浮理论,开创了架空高压输电线路巡检机器人的全新的实现方案,也为输变电的巡检和维护工作提供了新的思路,这种基于零接触、高效的磁悬浮驱动方式的巡检机器人具备非常广阔的应用前景。
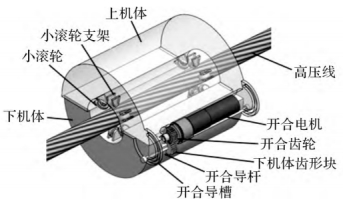
磁悬浮巡检机器人结构

磁力悬浮力装置与实验
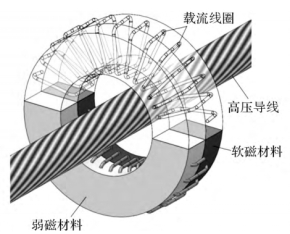
磁力直线牵引原理

磁力直线牵引装置与实验
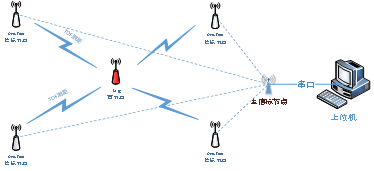
5.大型桥梁车辆载荷动态分布监测系统
桥梁车辆荷载动态分布的实时监测是桥梁健康监测亟待解决的问题,视觉多目标跟踪方案在车辆空间位置估计和数据关联等方面还存在瓶颈。引入点云处理和人工智能技术,提出一种突破技术瓶颈的新思路。首先,预先从不同视角同时采集车辆点云数据和彩色图像,通过点云快速拼接和多维数据融合,获取车辆彩色点云及其三维边界框;然后,在利用深度学习技术检测出车辆目标及其二维边界框的基础上,采用基于候选区域的三维边界框位姿回归估计新算法,提高车辆的空间定位能力;最后,根据预测结果,设定车辆彩色点云空间位姿,构建相机视角的二维虚拟场景,实现车辆遇遮挡后再现情形下的目标匹配。项目研究成果将为多目标跟踪过程中所遇到的三维定位和数据关联问题提供解科学依据和技术指引。
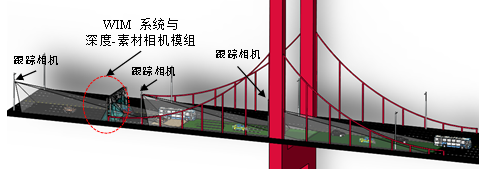
车辆荷载分布实时监测系统基本架构
6.3D点云与2D图像融合技术研究及其应用
在电子、半导体行业常常需要对PCB和芯片进行几何量和外观检测,传统的机器视觉方法受限于2D图像深度信息的缺失,难以正确获取或识别被检测对象的真实信息。研究一种3D点云与2D图像融合技术,采用多源、多维度数据对目标状态进行评估。首先通过传感器标定和拼接等技术将从不同视角采集到的点云与图像变换到统一坐标系,再利用点云灰度图将其与2D图像进行配准,根据3D点云或2D图像区域的连续性判断出由于光照条件或遮挡等因素造成的异常区域,实现孔洞填补或阴影消除,经尺度变换后融合成彩色三维点云。借助深度学习等人工智能手段对融合后的信息进行分析与评估,最终判断待检对象的状态。
5G天线耦合板外观检测
