团队简介
72886必赢欢迎光临机器视觉与智能装备团队重点针对机械工程领域的设计、制造、检测与控制等问题,开展机器视觉、智能控制、齿轮加工与检测等研究,在产品质量视觉检测、自动导航小车、齿轮智能加工、机器人遥操作等方向形成了优势与特色。
团队固定人员共有7人,其中教授4人,包括国务院特殊津贴专家、湖北省突出贡献中青年专家,另有副教授、讲师等科研人员组成。现有在读研究生45名。先后获得了国家重点研发计划、国家04重大科技专项、国家自然科学基金面上项目和青年项目、省自然科学基金创新群体等项目资助,具有从事机器视觉与智能控制的优异研究条件。
近五年研究团队已发表论文120余篇,包括IEEE Transactions on Industrial Informatics、IEEE ICIP、机械工程学报等。研究成果获得湖北省技术发明二等奖(第一单位1项、第二单位1项)、湖北省科技进步二等奖(第二单位4项)、湖北省科技进步三等奖(第一单位1项)。
成员介绍
负责人:
孙国栋,1981年9月,教授、博士,博/硕士生导师,南京321人才,湖北省农业工程学会理事,湖南省公路学会公路节能专业委员会委员,主要从事机器视觉、智能控制、机器学习、设备远程监控与故障诊断等方面的理论与技术研究。主持国家自然科学基金2项,主持省部级项目4项,企业合作项目10余项。获省部级科技二等奖2项、三等奖2项,中国产学研合作创新成果奖2项,国家级教学成果二等奖1项,省级教学成果一等奖1项、二等奖1项。发表学术论文60余篇,其中SCI收录论文11篇,EI(JA)收录论文6篇,出版专著2部,授权发明专利10项。
成员:
赵大兴,教授,博士,博/硕士生导师,国务院特殊津贴专家,湖北省突出贡献中青年专家,湖北省人民政府津贴专家,湖北省教学名师,湖北省“机械工程“名师工作室主持人。主要从事机械工程领域检测、设计、控制的教学和科研工作,主持国家自然科学基金2项,参与国家自然科学基金4项,主持04重大专项及NQI专项子项目各1项,省级重点或重大科研课题6项。获高等教育国家级教学成果二等奖1项,湖北省高等学校教学成果一等奖2项 ,湖北省科技进步二等奖2项,授权发明专利16项,出版专著2部。
丁国龙,教授,博士,硕士生导师,主要从事齿轮传动设计、齿轮加工与检测、齿轮加工智能化系统研发。主持完成省自然科学基金1项,省重大科技专项子课题1项,主持完成横向项目6项,获省科技进步二等奖2项,省技术发明二等奖1项,发表学术论文20余篇,EI(JA)收录论文3篇,授权发明专利5项。
许万,教授,博士,近年来主要从事于移动机器人、分布式多轴运动控制、工业以太网技术以及无线传感器网络等方面的研究。主持国家自然科学基金1项,中央军委装发部预研基金1项,省部级科研项目4项,获省科技进步三等奖1项,发表论文30余篇,授权发明专利4项,软件著作权4项。
赵迪,1981年5月,副教授、硕士生导师,湖北省机械工程学会机械设计与传动委员会理事。主要从事机械设计及理论、机器人遥操作和虚拟现实方面的研究。主持和参与省市级科研项目5项,获国家级教学成果二等奖1项,省科技进步二等奖1项,发表各类期刊论文30余篇,授权发明专利2项。
张杨,讲师,博士,主要研究领域包括机器视觉,图像处理,深度学习与多媒体信息处理等。在国内外刊物和顶级会议上发表论文20余篇,被SCI、EI收录14篇次(第一作者6篇,含3篇IEEE Trans.,总影响因子大于20),授权发明专利7项。主持南京大学优秀博士研究生创新能力提升计划项目,作为项目骨干参与多项国家自然科学基金重点基金和面上基金,同时担任多个国际顶级学术期刊和顶级会议的审稿人。

赵大兴 教授/博士 1962.12 |

孙国栋 教授/博士 1981.09 |

丁国龙 教授/博士 1968.07 |

许万 教授/博士 1979.08 |

赵迪 副教授/博士 1981.05 |

张杨 讲师/博士 1992.07 |
主要科研成果及项目
| 序号 |
项目名称 |
项目来源 |
负责人 |
到帐金额 |
起止年月 |
| 1 |
产出导向、产教融合的地方院校机械专业人才培养体系研究与实践 |
高等教育国家级教学成果二等奖 |
赵大兴 |
|
2018 |
| 2 |
基于产出导向的地方院校机械专业人才培养体系研究与实践 |
湖北省高等学校教学成果一等奖 |
赵大兴 |
|
2018 |
| 3 |
多变场景下产品视觉检测技术及应用 |
湖北省技术发明二等奖 |
孙国栋 |
|
2019 |
| 4 |
高精高效齿轮加工装备设计制造技术及应用 |
湖北省技术发明二等奖 |
丁国龙 |
|
2018 |
| 5 |
内齿轮高效加工关键技术及装备 |
湖北省科技进步二等奖 |
赵大兴 |
|
2016 |
| 6 |
乘用车柔性装配线物料智能配送关键技术及装备 |
湖北省科技进步三等奖 |
孙国栋 |
|
2016 |
| 7 |
高效安全工业炸药全自动包装关键技术及应用 |
湖北省科技进步二等奖 |
赵大兴 |
|
2014 |
| 8 |
七轴四联动数控多功能剃刀插齿机 |
湖北省科技进步二等奖 |
赵迪 |
|
2014 |
| 9 |
Ø1250mm- Ø3500mm高精高效数控插齿机 |
湖北省科技进步二等奖 |
丁国龙 |
|
2012 |
| 10 |
基于精确型高度函数的旋转机械振动参数图形细粒度故障识别方法研究 |
国家自然科学基金 |
孙国栋 |
60万元 |
2018.01-2021.12 |
| 11 |
基于凸优化的产品混叠缺陷图像盲分离方法研究 |
国家自然科学基金 |
赵大兴 |
61万元 |
2017.01-2020.12 |
| 12 |
面向重复性任务的多系统协同运动双耦合集成控制研究 |
国家自然科学基金 |
许万 |
25万元 |
2015.01-2017.12 |
| 13 |
基于层次特征提取与几何模型辅助的货车故障轨边图像识别方法研究 |
国家自然科学基金 |
孙国栋 |
25万元 |
2013.01-2015.12 |
| 14 |
基于纹理特征解耦的可重构织物表面质量视觉检测技术基础研究 |
国家自然科学基金 |
赵大兴 |
38万元 |
2011.01-2013.12 |
| 15 |
WG37125CNC高精度数控蜗轮加工机床 |
国家04重大科技专项-高档数控机床与基础制造装备(子课题) |
赵大兴 |
68.26万元 |
2015.01-2019.12 |
| 16 |
大尺度多站异构网络动态测量与空间位姿溯源方法与技术 |
国家重点研发计划NQI专项(子课题) |
赵大兴 |
30万元 |
2017.07-2020.12 |
| 17 |
智能数控系统关键部件研究与应用子课题-智能数控系统平台、功能与产品验证 |
湖北省科技厅 |
丁国龙 |
40万元 |
2020.01-2022.12 |
| 18 |
分布式机器视觉织物表面缺陷在线检测系统研究与开发 |
湖北省自然科学基金创新群体 |
赵大兴 |
20万元 |
2010.01-2012.12 |
团队照片展示
科研成果
1.多变场景下产品视觉检测技术及应用
传统人眼检测、抽样检测已无法满足要求,特别是高辐射、高温、易爆等危险作业环境需要机器视觉检测新技术。但现有视觉检测系统大多仅适用于特定应用场景、柔性较差,易受光照、复杂背景等干扰鲁棒性较差,对玻璃、金属等高反光产品识别困难。
项目组依托国家重点研发计划、自然科学基金等30多项课题,经12年联合攻关,发明并研发了一批具有自主知识产权的视觉检测技术及其系列化产品,形成三大技术体系:
1. 发明了基于软件芯片的多变场景下视觉检测重构方法,解决了当前视觉系统大多针对单一应用场景所固有的柔性差、不易扩展和升级等问题。
2. 发明了基于几何模型辅助与层次特征的图像分割方法,基于遗传算法的特征解耦与多特征融合的故障识别算法,实现了多目标复杂背景下高速精准的目标定位与多变场景下产品缺陷智能识别。
3. 发明了高反光表面双光栅成像装置、基于改进型激光三角法的FPC表面质量视觉智能检测方法,解决了高反光表面缺陷检测关键技术瓶颈。

|

|
纺织品外观疵点检测机 |
粘扣带外观疵点检测机 |

|

|
计量仪表视觉识别系统 |
微型电子接插件高精度视觉测量系统 |
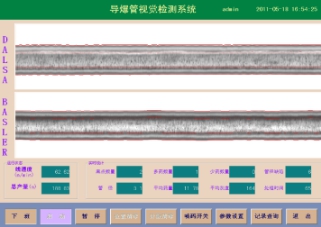
2.塑料导爆管质量检测系统
塑料导爆管质量检测系统是一套基于机器视觉的无损检测设备,它克服了人工检测效率低、劳动强度大的缺点,检测速度和检测精度均远高于同类红外检测设备,并完成对管内药量的精确标定和对管径的亚像素级测量。本系统大大提高了塑料导爆管的质量检测效率,保证了检测的高准确率,进而最大限度地保证了塑料导爆管的质量,保证了爆破工程的顺利进行和实施人员的人身安全。本系统已经在武汉人天投入使用。

|
|
塑料导爆管质量检测系统 |
系统检测界面 |
3.汽车转向器摇臂轴非圆齿扇修形技术
针对汽车转向中的柔性冲击、转向不平顺以及齿面非正常接触磨损等问题,提出一种C2阶连续的变传动比曲线设计以及齿面修形方法。采用齿轮啮合原理分析转向器非圆齿扇副传动性能,开发汽车转向器摇臂轴非圆齿扇三维参数化设计以及数控加工软件,实现汽车转向器摇臂轴零件CAD/CAM/CAE以及三维测量技术集成,在湖北三环、四川绵阳、广东江门等方向机厂得到推广应用,为汽车转向器行业非圆齿轮副设计、摇臂轴零件加工以及检测提供技术和方法。
三维参数化软件设计与建模


基于华中HNC-21MD/HNC-808的专用软件加工
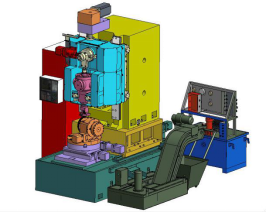
4.七轴四联动数控多功能剃刀插齿机
七轴数控多功能剃刀插齿机是专门用于加工剃齿刀齿面上沿齿形方向容屑小槽加工的专用机床。该产品的研发突破了国外封锁,填补了国内空白。通过专利技术实现了任意角度补偿的螺旋机构;实现了0.02mm的微量让刀;研究了容屑小槽不同排列形式的参数化排布、加工优化算法。首创专门算法,在同一机床上可实现对径向剃刀槽和轴向剃刀槽的集成加工;利用数控多轴联动实现等高槽加工。